Sea D un conjunto de R2, una región plana. Un campo vectorial sobre R2, es una función F que asigna a cada punto (x, y) en D un vector bidimensional
F(x, y) = (P(x, y); Q(x, y))
donde:
P(x, y) y Q(x, y) son funciones escalares de 2 variables y a veces se les llama campos vectoriales.

Sea D un conjunto de R3, una región plana. Un campo vectorial sobre R3, es una función F que asigna a cada punto (x, y, z) en D un vector bidimensional
F(x, y, z) = (P(x, y, z); Q(x, y, z); R(x, y, z))
donde:





P(x, y, z) y Q(x, y, z) son funciones escalares de 2 variables y a veces se les llama campos vectoriales.
Observación:
- Para definir la continuidad de un campo vectorial se debe analizar la continuidad de cada una de sus componentes.
- Un campo vectorial F es conservativo, si es el gradiente de alguna función es decir, si existe una función f, tal que F sea igual al gradiente de f. En esta situación f recibe el nombre de función potencial de F.
Campo Gravitacional:
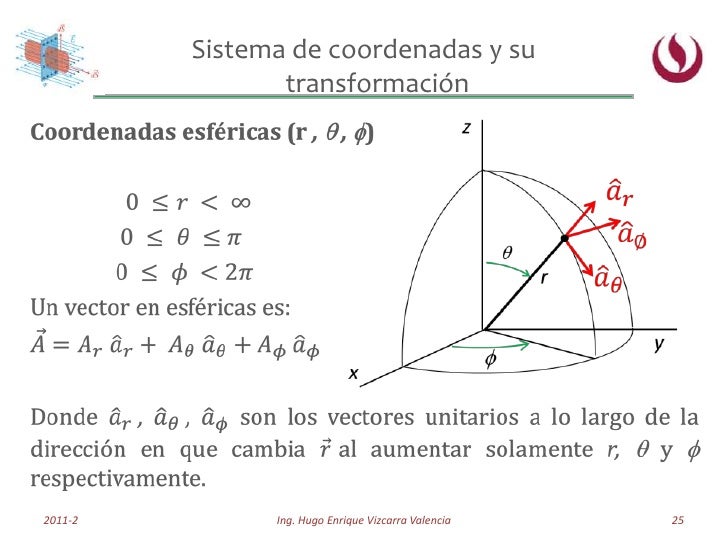
En física, se suele utilizar r en lugar de x para el vector posición:
Campo Gradiente:
Si f es una función escalar de dos variables, su gradiente se define como:
- Por lo tanto, el gradiente de f(x, y) es realmente un campo vectorial gradiente.
Divergencia (divF):
Sea F(x, y, z) = ((P(x, y, z), Q(x, y, z), R(x, y, z)), la divergencia de F, denotado por: divF, es el campo escalar definido por el producto escalar entre el gradiente y la función F,
La divergencia se puede denotar de la siguiente manera
Rotacional (rotF):
El rotacional de un campo vectorial F(x, y, z) = ((P(x, y, z), Q(x, y, z), R(x, y, z)), denotado por RotF es el campo vectorial definido por:







 su vector de posición. Cuando tratamos con un sistema continua, la expresión se transforma según el cambio
su vector de posición. Cuando tratamos con un sistema continua, la expresión se transforma según el cambio

 un vector que recorre cada uno de los puntos del sistema y
un vector que recorre cada uno de los puntos del sistema y