miércoles, 22 de febrero de 2017
martes, 21 de febrero de 2017



viernes, 17 de febrero de 2017
TEOREMA DE GREEN
La orientación positiva sobre una curva en un plano es en el sentido anti horario por convención.

otras formas de notación:


otras formas de notación:
ÁREAS :
El teorema de green proporciona las siguientes formulas para determinar el area:
martes, 14 de febrero de 2017
CONSERVACION DE LA ENERGÍA
En un campo de fuerzas continuo F se hace que se desplace un objeto a lo largo de una trayectoria C definida por ,r(a)= A , donde es el punto inicial y es el punto final de C. De acuerdo con la segunda ley de Newton del movimiento, la fuerza Frt en un punto sobre C se relaciona con la aceleración mediante la ecuación:
F(r(t))= mr"(t)


Si un objeto se mueve desde un punto A hacia otro punto B bajo la influencia de un campo de fuerzas conservativo, entonces la suma de su energía potencial y de su energía cinética es constante. Este enunciado recibe el nombre de ley de la conservación de la energía, y es la razón de que el campo vectorial se llame conservativo.
viernes, 10 de febrero de 2017
martes, 7 de febrero de 2017
INTEGRAL DE LINEA
Teorema fundamental de integrales de linea
P(x,y,z)dx+Q(x,y,z)dy+R(x,y,z)dz
Diferencial exacta

Si es exacta sus derivadas parciales son continuas y por lo tanto es conservativa. Existe una funciónf(x,y,z)=P(x,y,z)dx+Q(x,y,z)dy+R(x,y,z)dz tal que:

INTEGRAL DE LINEA DE PRIMERA ESPECIE

INTEGRAL DE LINEA DE SEGUNDA ESPECIE

viernes, 3 de febrero de 2017
ROTOCIONAL DE UN CAMPO VECTORIAL CONSERVATIVO
Se entiende por rotacional al operador vectorial que muestra la tendencia de un campo a inducir rotación alrededor de un punto. También se define como la circulación del vector sobre un camino cerrado del borde de un área con dirección normal a ella misma cuando el área tiende a cero (Ecuación 1).
 (1)
(1)
Aquí,  S es el área de la superficie apoyada en la curva C , que se reduce a un punto. El resultado de este límite no es el rotacional completo (que es un vector), sino solo su componente según la dirección normal a S y orientada según la regla de la mano derecha. Para obtener el rotacional completo deberán calcularse tres límites, considerando tres curvas situadas en planos perpendiculares.
S es el área de la superficie apoyada en la curva C , que se reduce a un punto. El resultado de este límite no es el rotacional completo (que es un vector), sino solo su componente según la dirección normal a S y orientada según la regla de la mano derecha. Para obtener el rotacional completo deberán calcularse tres límites, considerando tres curvas situadas en planos perpendiculares.
El rotacional de un campo se puede calcular siempre y cuando este sea continuo y diferenciable en todos sus puntos.
El resultado del rotacional es otro campo vectorial que viene dado por el determinante de la siguiente ecuación:

Las propiedades más destacadas del rotacional de un campo son:
• Si el campo escalar f(x,y,z) tiene derivadas parciales continuas de segundo orden entonces el rot ( f) =0
f) =0
• Si F(x,y,z) es un campo vectorial conservativo entonces rot (F) = 0
• Si el campo vectorial F(x,y,z) es una función definida sobre todo  cuyas componentes tienen derivadas parciales continuas y el rot (F) = 0, entonces F es un campo vectorial conservativo.
cuyas componentes tienen derivadas parciales continuas y el rot (F) = 0, entonces F es un campo vectorial conservativo.
LAPLACIANO DE UN CAMPO ESCALAR
La divergencia del gradiente de una
función escalar se llama Laplaciano. En coordenadas rectangulares:

El Laplaciano encuentra aplicación en la Ecuación
de Schrodinger en mecánica cuántica. En electrostática, es una parte
de la ecuación
de LaPlace y la ecuación
de Poisson para las relaciones entre el potencial eléctrico y la
densidad de carga.
FUNCIÓN ARMÓNICA

INTEGRACIÓN DE LINEA
Teorema fundamental de integrales de linea
P(x,y,z)dx+Q(x,y,z)dy+R(x,y,z)dz
Diferencial exacta
Si es exacta sus derivadas parciales son continuas y por lo
tanto es conservativa. Existe una función
f(x,y,z)=P(x,y,z)dx+Q(x,y,z)dy+R(x,y,z)dz tal que:
martes, 31 de enero de 2017
CAMPOS VECTORIALES
Sea D un conjunto de R2, una región plana. Un campo vectorial sobre R2, es una función F que asigna a cada punto (x, y) en D un vector bidimensional
F(x, y) = (P(x, y); Q(x, y))
donde:
P(x, y) y Q(x, y) son funciones escalares de 2 variables y a veces se les llama campos vectoriales.

Sea D un conjunto de R3, una región plana. Un campo vectorial sobre R3, es una función F que asigna a cada punto (x, y, z) en D un vector bidimensional
F(x, y, z) = (P(x, y, z); Q(x, y, z); R(x, y, z))
donde:





P(x, y, z) y Q(x, y, z) son funciones escalares de 2 variables y a veces se les llama campos vectoriales.
Observación:
- Para definir la continuidad de un campo vectorial se debe analizar la continuidad de cada una de sus componentes.
- Un campo vectorial F es conservativo, si es el gradiente de alguna función es decir, si existe una función f, tal que F sea igual al gradiente de f. En esta situación f recibe el nombre de función potencial de F.
Campo Gravitacional:
En física, se suele utilizar r en lugar de x para el vector posición:
Campo Gradiente:
Si f es una función escalar de dos variables, su gradiente se define como:
- Por lo tanto, el gradiente de f(x, y) es realmente un campo vectorial gradiente.
Divergencia (divF):
Sea F(x, y, z) = ((P(x, y, z), Q(x, y, z), R(x, y, z)), la divergencia de F, denotado por: divF, es el campo escalar definido por el producto escalar entre el gradiente y la función F,
La divergencia se puede denotar de la siguiente manera
Rotacional (rotF):
El rotacional de un campo vectorial F(x, y, z) = ((P(x, y, z), Q(x, y, z), R(x, y, z)), denotado por RotF es el campo vectorial definido por:
viernes, 27 de enero de 2017
MOMENTOS DE INERCIA
1._ Masas puntuales
Los momentos de inercia de las “n” masas
respecto a los ejes coordenados:

2._ Masa continúa
Sea L una lámina los momentos de inercia con
respecto a los ejes coordenados son:

martes, 24 de enero de 2017



viernes, 20 de enero de 2017
CENTRO DE MASA
El centro de masa es el punto donde se considera que esta concentrada la masa de un cuerpo

Caso discreto



Caso discreto
Para un sistema discreto la posición del centro de masas (CM) viene dada por la expresión
donde mi es la masa de cada partícula y  su vector de posición. Cuando tratamos con un sistema continua, la expresión se transforma según el cambio
su vector de posición. Cuando tratamos con un sistema continua, la expresión se transforma según el cambio
su vector de posición. Cuando tratamos con un sistema continua, la expresión se transforma según el cambio
Caso continuo
en un sistema continuo la posición del centro de masas viene dada por la expresión
siendo  un vector que recorre cada uno de los puntos del sistema y dm la masa infinitesimal asociada a cada uno de esos puntos.
un vector que recorre cada uno de los puntos del sistema y dm la masa infinitesimal asociada a cada uno de esos puntos.
un vector que recorre cada uno de los puntos del sistema y dm la masa infinitesimal asociada a cada uno de esos puntos.martes, 17 de enero de 2017
TRANSFORMACIÓN DE INTEGRALES MULTIPLES
- Dada una integral doble de una función F(x, y) definida en un dominio Dxy, es posible realizar un cambio de variables para otro dominio Duv de la siguiente manera:Sustituimos x por una función H(u, v), e y por otra función G(u, v).
-

- J se denomina Jacobiano, y resulta de resolver un determinante formado por las derivadas parciales de las funciones H y G.
- Donde:
- |J|: Determinante Jacobiano de la transformación de las variables (x,y) a (u,v)

Coordenadas Polares:


Coordenadas Cilíndricas:


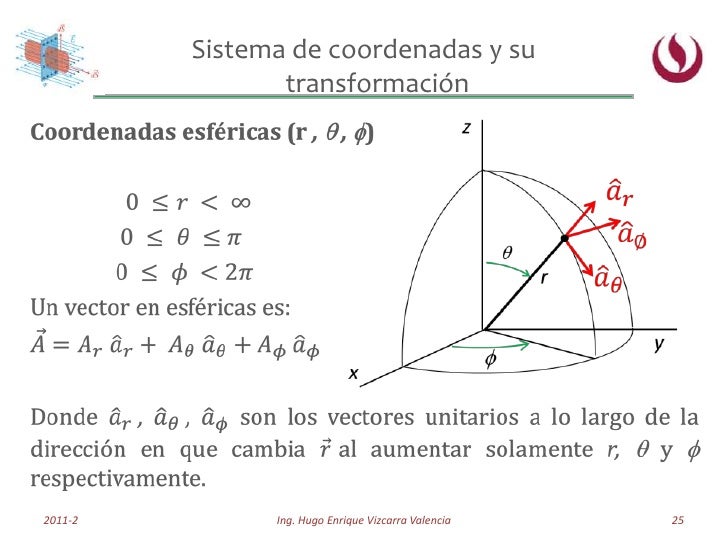
Coordenadas Esféricas
martes, 10 de enero de 2017
INTEGRALES MULTIPLES
Al igual que las integrales de una variable sirven para calcular el área bajo una gráfica, las integrales dobles sirven para calcular volúmenes.
Concretamente, cuando F ≥ 0, la integral ∫ d c ∫ b a F(x, y) dxdy es el volumen bajo la gráfica en el rectángulo [a, b] × [c, d], esto es, a ≤ x ≤ b, c ≤ y ≤ d. Lo mismo se cumple en regiones más generales. Es decir, si R es una región del plano y F = F(x, y) es una función no negativa en ella, entonces (1) ∫∫ R F = Volumen bajo la gráfica de F sobre la región R.

TIPOS DE REGIONES DE INTERSECCIÓN
Regiones rectangulares

Regiones mas generales
1._ Verticalmente simple
2._ Horizontalmente simple

viernes, 6 de enero de 2017
MAXIMOS Y MINIMOS CONDICIONADOS
MULTIPLICADOR DE LAGRANGE
Se llama punto extremo condicionado de una función f(x,y) al
punto critico que satisface tal definición, pero que adicionalmente debe
cumplir con la condición de que sus variables independientes estén relacionadas
entre sí, mediante una ecuación de enlace g(x,y)=0.
Para hallar un extremo condicionado de f(x,y) con la ecuación de enlace g(x,y)=0, se forma la llamada función de Langrange:
Para hallar un extremo condicionado de f(x,y) con la ecuación de enlace g(x,y)=0, se forma la llamada función de Langrange:
F(x,y,λ)=f(x,y)+λg(x,y)
Dónde:
l: multiplicador de Lagrange, parámetro constante
Si se tiene un función de 3 variables:
u = f(x,y,z)
g1(x,y,z) = 0 ^ g2(x,y,z) = 0
entonces
F(x,y,z,λ1,λ2)= f(x,y,z) + λ1 g1(x,y,z) + λ2 g2(x,y,z)
Método de multplicador de Lagrange
Para determinar los valores externos de f(x,y,z) sujeta a la restricción g(x,y,z)=0 suponiendo que estos valores existen y que ∇g≠0 se encuentra en la superficie g(x,y,z)=0
a) Determine todos los valores de x,y,z y λ tales que:
∇ f(x,y,z)= λ∇ g(x,y,z)
b) Evalúe f en todos los puntos (x,y,z) encontrados, el mayot de todos es el máximo de f y el menor el mínimo de f.
Dónde:
l: multiplicador de Lagrange, parámetro constante
Si se tiene un función de 3 variables:
u = f(x,y,z)
g1(x,y,z) = 0 ^ g2(x,y,z) = 0
entonces
F(x,y,z,λ1,λ2)= f(x,y,z) + λ1 g1(x,y,z) + λ2 g2(x,y,z)
Método de multplicador de Lagrange
Para determinar los valores externos de f(x,y,z) sujeta a la restricción g(x,y,z)=0 suponiendo que estos valores existen y que ∇g≠0 se encuentra en la superficie g(x,y,z)=0
a) Determine todos los valores de x,y,z y λ tales que:
∇ f(x,y,z)= λ∇ g(x,y,z)
b) Evalúe f en todos los puntos (x,y,z) encontrados, el mayot de todos es el máximo de f y el menor el mínimo de f.
Suscribirse a:
Comentarios (Atom)